位置フィードバックと位置フィードゲイン
高精度な位置決めや輪郭加工、繰り返し精度を実現するには、単にモーターを動かすだけでは不十分です。
必要なのは、「どこまで動いたか」「ズレていないか」をリアルタイムで検知・修正する制御システム──それがフィードバック制御の世界です。
この記事では、**「位置フィードバック」と「位置フィードゲイン」**の違いと役割を、CNCやロボット制御に関わる実務者向けに解説します。
位置フィードバックとは?
位置フィードバックとは、実際の位置情報をセンサから取得し、指令値(目標位置)と比較して制御に反映させる仕組みです。
🔁 概要フロー:
- コントローラが目標位置を指令
- サーボモーターが移動開始
- エンコーダやリニアスケールが「現在位置」を検出
- その差(誤差)をもとに制御信号を補正
このしくみが、位置のズレ(追従誤差)をリアルタイムで補正し、加工精度を担保します。
位置フィードゲインとは?
位置フィードゲイン(Position Feedback Gain)とは、この誤差に対して、どのくらいの強さで補正をかけるかを決める制御パラメータです。
\text{補正信号} = \text{位置誤差} \times \text{位置フィードゲイン}
- ゲインが高い:誤差に対して素早く・強く補正(反応が鋭い)
- ゲインが低い:ゆるやかに補正(安定だが遅れる)
なぜゲイン調整が重要なのか?
位置フィードゲインは、加工精度と動作安定性のバランスを取るための重要な設定です。
▶ 実際の制御では、「位置」「速度」「加速度」などと合わせて多段階ゲイン調整が行われます。
工作機械やロボットにおける応用
- CNC加工機:輪郭加工・高速送り時の軌跡精度確保
- 産業ロボット:正確なティーチングと動作再現性
- 半導体装置:ナノメートル精度でのステージ位置決め
- 3Dプリンタ:滑らかな曲線・シャープなエッジ生成
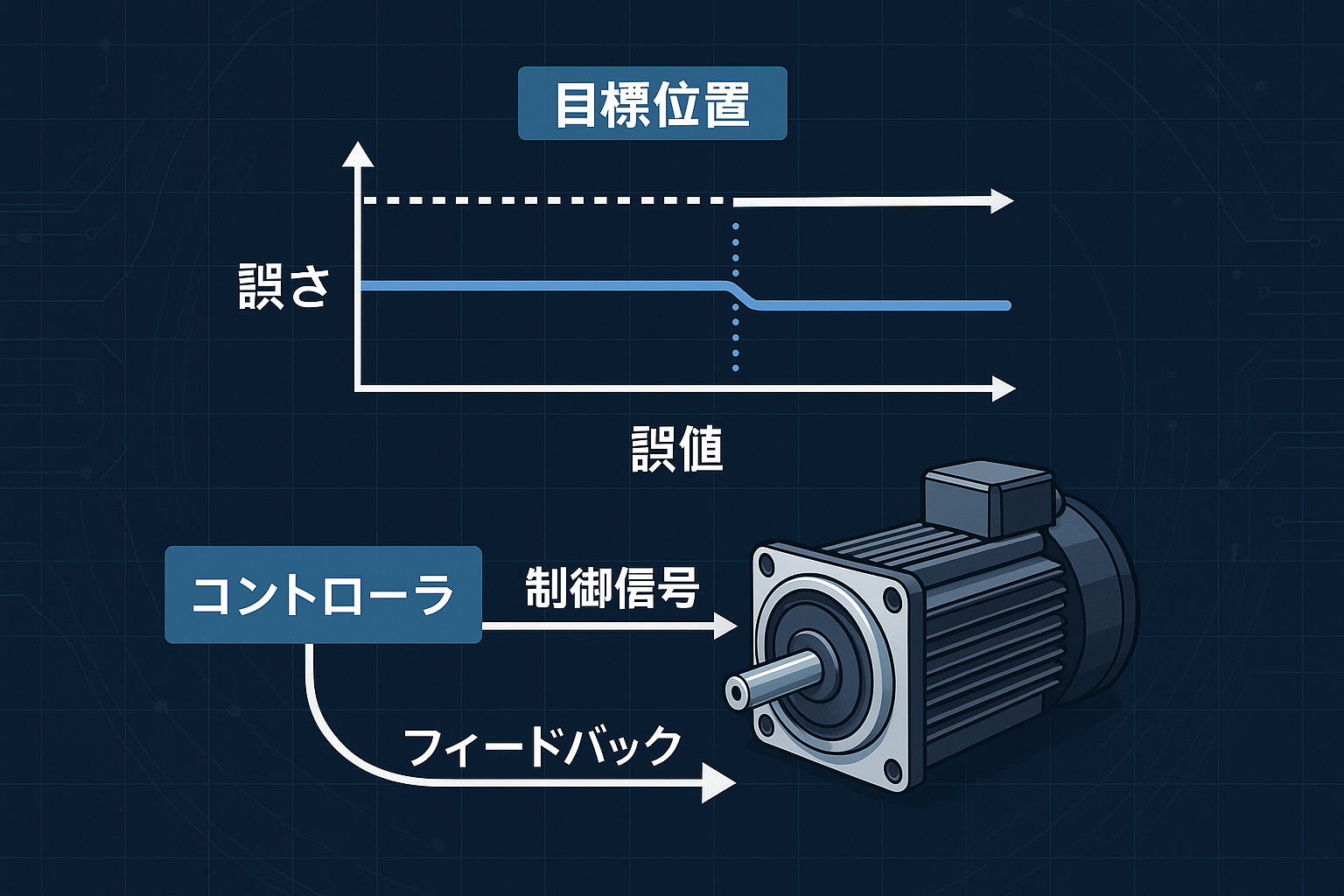
フィードバック制御の構成図(簡略)
[目標位置]
↓
[制御演算(サーボコントローラ)] ←←←←←←←
↓ ↑
[モーター駆動] ↑
↓ ↑
[実際の位置(エンコーダ・リニアスケール)]
↓ ↑
[比較:誤差検出] —→ フィードバック信号 —→ 補正
実務でのゲイン調整のヒント
- 送り速度を上げた時に輪郭が乱れる → ゲイン不足の可能性
- 工具が共振する・ギクシャク動く → ゲイン過剰の可能性
- 精密穴位置ズレがある → リニアエンコーダを追加 or ゲイン強化
多くの制御装置には自動ゲインチューニング機能も搭載されていますが、熟練の手調整が要求される場面も多いです。
まとめ:フィードバックは「制御の感覚器官」
位置フィードバックは「目」、位置フィードゲインは「反応の敏感さ」。
この2つのバランスが、加工精度・動作安定・高速応答の鍵となります。
現代の制御技術は、単に「動かす」のではなく、「ズレを見て、的確に戻す」ことで、
ミクロン単位の精度と高能率を両立する世界へと進化しているのです。
